Sensor orientation
ENV-548
This file is part of the content downloaded from Sensor orientation.
 |
Objectives
support: Polycopies No. 279 Sensor Orientation (price of paper 100 pages) - PDF via moodle Assistant office hours: during exercises session! |
- News forum (Forum)
- Forum (Forum)
- Polycopie - Sensor Orientation (PDF) (File)
- Agenda (File)
- Guidelines for lab reports (File)
- Presentations schedule (URL)
- Sensor presentation slides (Folder)
Theory:
- Overview and course organisation (see slides introduction)
- Least-square (LS) estimation (2.2.1), review of main principles on a simple example (black-board)
- Recursive least-square (RLS) (2.2.2) and how to apply it
- Exercises LS / RLS
- Introduction (File)
- Applications (File)
- Ch02 - Parameter estimation - refresher (File)
- Video - Least squares 1/3 (parameters) - 18 min (URL)
- Video - Least squares 2/3 (covariance) - 7 min (URL)
- Video - Least squares 3/3 (example) - 13 min (URL)
- Video - RLS derivation (1/2, 10 min) (URL)
- Video - RLS - derivation (2/2, 11 min) (URL)
- Additional least-square example (harmony) (File)
- Exercices week 1 (File)
- Exercises week 1 solution (File)
Theory:
- Stochastic processes (5.1) - characteristics (slides with a demo)
- Stochastic error models (5.2) - generations (slides with a demo)
- Stochastic model identification (5.5) - online demo
- Reading assignment Ch05 - Sensor errors (5.1) (File)
- Random Processes (slides) - see Chap 05 (File)
- Matlab code for Allan deviation (File)
- Stochastic Process Identification using Wavelet variance (on-line tool) (URL)
- Stochastic Process Identification using Wavelet variance (paper) (File)
- LAB 1 Handout (File)
BEFORE LECTURE - please read Sec 3.1 and 3.2.1. (4 pages)
Reference systems:
- Inertial (i) - please refer to black board notes and lecture notes
- ECEF(e) - please refer to black board notes and lecture notes
- Local-level(l) - please refer to black board notes and lecture notes
Sensors - student presentation
- Ch03 - Reference frames (File)
- Reference frames - slides (File)
- Exercise 2 (File)
- Exercise-2-Solution (File)
Test 1 (15 %)
Theory on Reference systems (2nd part):
Theory on Reference systems (2nd part):
- Body frame (b) - please refer to black board notes, lecture notes and slides (attitude)
- Time derivative of a rotation matrix (black board, slides & lecture notes)
Exercise session:
- (1) Rotation matrix time derivative - application for "i" to "e"-frame (solution via video)
- (2) Rotation matrix time derivative - application in general frame transformation (solution in pdf)
- (3) Preparation for Lab 2 - please read the 3 pages in next week & control it
- Lecture - Body rotation and rotation time derivative (File)
- Complementary slides on attitude representation (only for your curiosity) (File)
Preparation: please read the 3 pages of "Lab2_preparation.pdf"
Theory:
- Flowcharts of Navigation equations in the "i" - frame
- Numerical integration
- (1-axis attitude "solver")
Lab 2 : integration of a nominal signal
- Lecture - inertial navigation I. (File)
- Lab 2 preparation (value of nominal signal) (File)
- Lab 2 preparation (strapdown inertial navigation) (File)
- Lab 2 Handout (File)
Theory:
- Navigation equations in "e-frame"
- Flowcharts of navigation equations in the "e"-frame
- HANDS ON APPLICATION
Lab 3: 2D inertial navigation with a realistic signal
- Lecture - navigation equations in e-frame (File)
- Lab 3 (File)
- Lab 3 - help on noise generation (File)
Theory:
Lab 4 - Attitude initialisation - from real data + sense of Earth "properties"
- Attitude initialisation (alignment) - how to perform it ?
- Attitude initialisation - effect (impact) of imperfections?
Lab 4 - Attitude initialisation - from real data + sense of Earth "properties"
- Chap07 - Initial alignment (File)
- Lecture - Attitude Initialisation (File)
- Lab 4 - definition (File)
- readimu - Python (File)
- readimu - MATLAB (File)
- Lab 4 - Data_file 2025 (Folder)
- Lab 4 - Data_Assignments (URL)
Preparation:
- Navigation equation in "l-frame" (Read Chap 6.4+ Chap 6.5)
- 3D Attitude integration
- Navigation equation in "l-frame" with a flowchart (Hint: read Chap 6.4+ Chap 6.5 before)
- Differences of "l-frame" & "e-frame"
- Initial alignment - and the rise of Schuler oscilation
- Inertial error coupling and surveying procedure with INS
Exercise session - frames, sensor data, navigation equations and their solutions
Theory:
- Attitude initialisation (alignment) - how to perform it ?
- Attitude initialisation - effect (impact) of imperfections?
Lab 4 - Attitude initialisation - from real data + sense of Earth "properties"
Theory & Practice of Strapdown Inertial Navigation:
- 3D Attitude integration
- Navigation equation in "l-frame" with a flowchart (Hint: read Chap 6.4+ Chap 6.5)
- Differences of "l-frame" & "e-frame"
- Initial alignment - and the rise of Schuler oscilation
- Inertial error coupling and surveying procedure with INS
Exercise session - frames, sensor data, navigation equations and their solutions
Midterm: 13:15 - 14:00
Theory:
- Introduction to Kalman Filtering (KF).
- KF symbols, terminology and algorithm.
- Simple kinematic models in theory & practice - Lab 5(7)
- Kalman Filtering - Basic Synthesis (File)
- Lab 5 - creation of the motion model (~12 minutes) (File)
- Lab 5 - derivation of the observations noise matrix (~12 minutes) (File)
- LAB-5 (File)
Theory:
- Relation between dynamic (F) and transition (PHI) matrices.
- Numerical evaluation of transition (PHI) and process noise (Q) matrices
- Linearised and Extended Kalman Filter (EKF)
- More examples on motion modelling
- Sensors
- Lecture - Extended Kalman Filter (File)
- Sensor Fusion at Google (link to an optional video with time-line, best to watch min 8:45-27:00) (File)
Theory:
- Approaches to integration of satellite and inertial observations - read Chap 8 - satellite positioning first !!
- EKF setup for GPS/INS integration read Lab6 - help first !!!
- Sensors
- Lecture - INS/GPS Integration + EKF in Lab6 (File)
- Lecture - blackboard complemented slides (File)
- Concept question - velocity control by Police (File)
- Lab-6 (File)
- Lab 6 - help (filter setup) (File)
Theory:
- Observability of state vector (for time invariant, F, PHI)
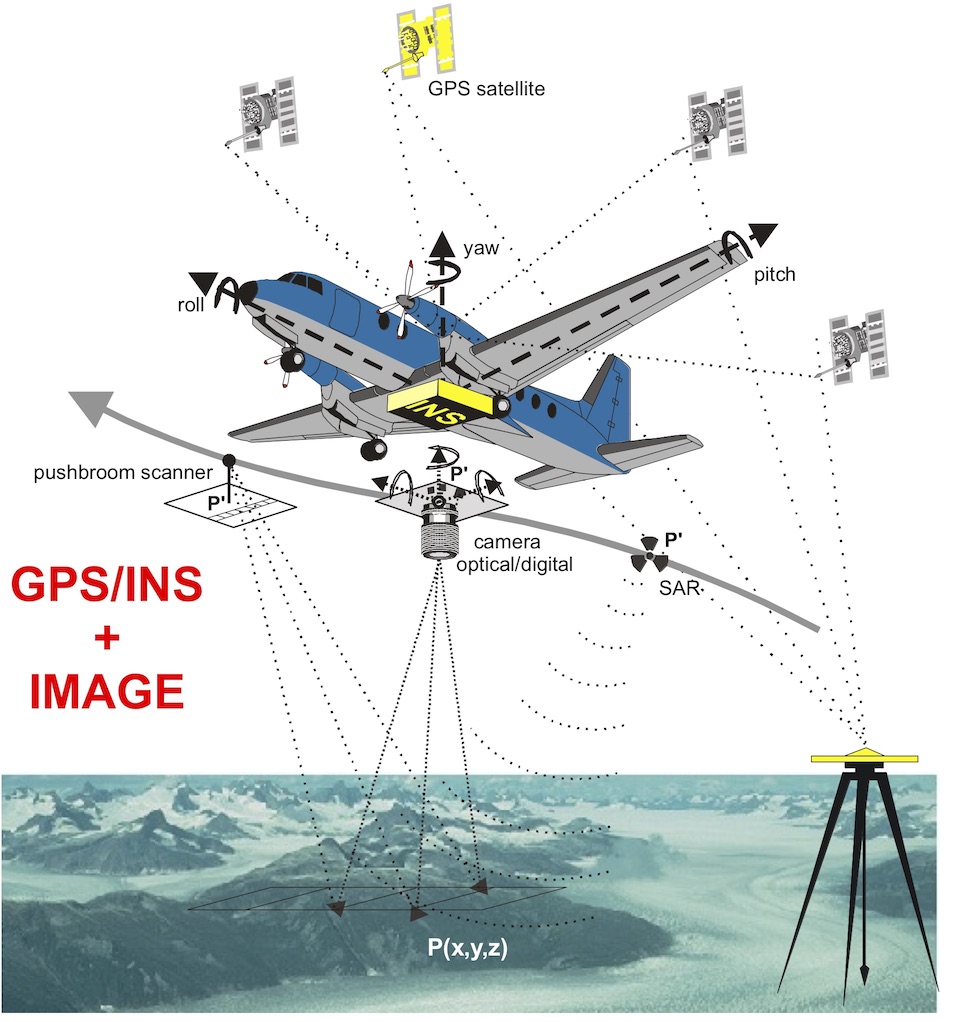
- Direct and integrated sensor orientation
- Orientation transformation procedures
- EKF Q/A – conceptual & modeling
- How to handle time-correlated measurements in KF/EKF?
- Perspectives: (a) AI/ML in KF, (b) tight-integration of IMU data with optical inputs
- Lab 6 in game & over the implementation hurdles
- Lecture slides - EKF review & adds on (File)
- State estimation or AI/ML? (File)
- Solution of home exercise on 1D modelling (File)
- About oral exam (File)